这是十周年重修工科数学系列课程之… 线性代数基础。重修这件事,有效缓解了焦虑和失眠,让自己觉得,生活除了吃饭睡觉和想象空间愈发匮乏的工作,还是有一些其他内容的。
向量空间和其(线性)子空间的定义
线性空间需要满足加法封闭和数乘封闭:
- 加法封闭(可加性)
- 空间内任意两向量相加(减),结果必须还在空间中:
- 数乘封闭(齐次性)
- 空间内任意向量乘以标量,结果必须还在空间中:
注意“数乘封闭”隐含了: 线性空间必须包括零向量(当 时);因为线性变换不研究坐标系原点的移动(假设所有向量都从同一原点出发)。
确立一个线性空间子空间需要知道:
- 空间的维数(假设为 )
- 空间中一组 个线性无关的向量,称为基(basis)
线性空间的两个封闭要求刚好对应了向量的两种线性组合方式,所以可以理解子空间是由基向量所有的线性组合张成(span)的向量空间。
基的正交标准化
空间的基不要求正交和模长为 1,但是如果它满足这两点,会更方便计算。对应的术语是正交化(orthogonal)和标准化(normal),两点都具备时可以用合成词正交标准化(orthonormal)称呼。
有意思的是,我阅读了一些书籍和维基百科,得知根据以上向量空间的定义,“长度”和“夹角”并不是一个向量空间的内禀特性。我们需要额外引入“内积”的定义,即让两个向量点乘之后得到一个标量,才借此产生了模长和夹角,进而可以定义什么是标准化(模长为 1)和正交化(夹角垂直)。引入了内积的线性空间称为内积空间。
当然高维空间不能像二维或者三维空间那样直观地想象长度、夹角乃至夹角垂直,但是可以根据向量和自己的内积来定义模长的平方,根据两向量内积为 0 来定义垂直。
代数方法研究向量空间往往不强依赖坐标系统,但是如果引入坐标轴,套用二维或者三维空间的几何意义,那么最常见的一组标准正交基就是坐标轴上的单位向量。以其为列向量合成矩阵,即得到仅对角线为 1 其他位置都是 0 的方阵——单位矩阵(identity matrix)。
矩阵的四个基本子空间的定义
先要非正式地定义一下矩阵的秩:秩(rank)即矩阵最大线性无关组中包含的向量数 —— 刨除所有因为和其他向量线性相关,而在作为基向量的时候对张成空间的维数“毫无贡献”的向量之后,剩下的有效向量数目。
无论是否是方阵,都可以根据行向量或者列向量是否线性无关,来得到行秩和列秩。行秩一定等于列秩,不在这里证明这一点。但知道这一点时,仅取行秩或列秩就可以知道矩阵的秩。
假设 A 是 的矩阵,其秩为 :
- 列空间(column space)
A 中所有列向量张成的子空间,维度是 r,记作:
- 行空间(row space)
A 中所有行向量张成的子空间,维度是 r,记作:
- 零空间(nullspace)
以 A 为系数矩阵的齐次线性方程组的所有非平凡解集张成的子空间,说人话就是“能令 Av = 0 的所有非零 v”:
- 左零空间(left nullspace)
类似列空间和行空间的关系,左零空间是 A 的转置的零空间;“左零”的说法来自其定义中矩阵是“左乘”到向量上的,而不是习惯上的右乘:
非奇异(可逆)矩阵的子空间
矩阵非奇异(可逆)的充分必要条件是矩阵的行、列数都等于其秩,即满秩矩阵。无论是行向量之间,还是列向量之间,都线性无关——矩阵中的每一行都为行空间贡献了维度,每一列都为列空间贡献了维度。
正因如此,非奇异矩阵的零空间和左零空间就成了零维的——其中只包含零向量(参考定义中关于子空间维数)。非正式地说法可以是“非奇异矩阵没有零空间和左零空间”。
实际上两个行列空间和两个零空间构成某种补集关系,见下节。
行列空间和零空间的正交补关系
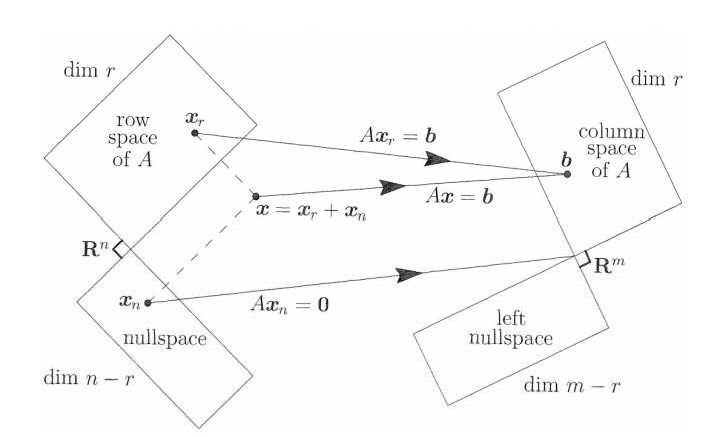
这张出处不详的图,很好地描述了四个基本子空间的关系。维系这个关系的关键动作,在于矩阵被用于线性变换(线性映射)。
上述线性方程组的矩阵写法,可以诠释为矩阵 对(作为未知数集的) 向量进行了线性变换,产生了向量 。
这个变换的过程中,向量 来自 的行空间或零空间(左侧的两个空间),变化后到达列空间。因为按照矩阵乘法的定义, 一定是 中各列按照 的线性组合(或者说以 中各列为基, 的坐标表示)。
对于非奇异矩阵,因为它是满秩的,行空间足以张成整个 空间,列空间足以张成整个 空间(假设 是 的矩阵),那么行空间中所有向量一定可以一一映射到列空间中,行空间中零向量也只映射到列空间的零向量上。
对于奇异矩阵,因为行空间中存在浑水摸鱼的向量,其只能张成 维空间( ),剩下的 维构成了零空间,零空间中的向量可能不是零,但在 的线性变换作用下却映射到列空间的零向量上,即方程说的 的非平凡( 不为 0 的)解。
也就是说,零空间中的任何向量,和 的任何一个行向量的内积都是 0,按照内积空间的定义,它们正交。整个零空间和整个行空间构成正交补的关系。引用 Dante 老师的话:
行空间的正交可以理解:它的 nullspace 就是跟行空间垂直的向量组成的
在上面这个变化过程中,左零空间没有参与。其实可以将 A 转置来得出类似于“行空间正交于零空间”的结论,列空间也正交于左零空间。
这个变换其实是将右乘的线性变换两边转置,以交换 的行和列。此时行向量 存在于列空间中或左零空间中。若 存在于列空间,则在矩阵左乘的变换下映射到行空间中的 ;若 存在于左零空间中,则在矩阵左乘的变换下映射到零向量。
其他的称呼
矩阵可以表示线性变换(一般习惯还是用右乘,即矩阵在左向量在右),在语境为线性变换的时候,列空间和零空间有别的称呼:
- 列空间称为线性变换的“像”(image)
- 行空间称为线性变换的“原像”(preimage)
- 零空间称为线性变换的“核”(kernel)
非常的形象了,零空间变换后是要坍缩成一个点(零向量)的,不就是“核”么。
用到左零空间的地方
看起来左零空间在(正向的)线性变换中根本不出现,而且只是列空间的正交补,比较没有意思。
不过往后学习一点,还是会用到的。默认在定义矩阵的逆的时候,只对可逆的方阵(非奇异)才有意义,因为可逆矩阵的零空间真的是个零(只有零向量),那么行空间中每个向量都可以一一映射到列空间中,自然映射也就可逆——找出逆矩阵,将原矩阵列空间中的向量再映射回行空间。
对于奇异矩阵,因为零空间的存在,零空间中的非零向量会被矩阵映射到零向量上。那么无论如何,我们都没法再找出一个矩阵,能把零向量映射回原零空间中的非零向量了——变成零后信息已经丢失了。这也是“不可逆”的原因。
但是对于不可逆的矩阵(可以是奇异方阵,甚至可以是长方矩阵),可以定义其“伪逆”(pseudo-inverse),即在正向变换的时候,仍然是行空间映射到列空间,零空间映射到零向量;逆向变换的时候,将列空间映射回行空间,左零空间则映射到零向量。
嗯… 就是接受有的分量(在左零空间)中会丢失(退化)这件事,因为反正它们也是从零空间来的。所以伪逆的概念里蕴含了某种投影的思想…
这个在最小二乘法里比较有用,因为反复收集数据很可能因为数据重复导致矩阵奇异。这个时候我们希望“浑水摸鱼的向量就不要出声”,求伪逆当作逆用就好。
求伪逆的方法,其中一种是对矩阵 做奇异值分解(SVD),将其变成两个正交矩阵和一个对角矩阵的乘积。正交矩阵一定可逆,其伪逆就是其逆;对角矩阵如果对角线不含零元素(对角矩阵也可逆),求逆时取对角线元素的倒数即可;不可逆矩阵的 SVD 中,对角矩阵一定含有零元素,那么求伪逆时只对非零元素取倒数,零元素仍然取零(对应左零空间仍然映射到零向量),得出对角矩阵伪逆。再将三个逆和伪逆重新合成,得到 的伪逆。
线性方程组的通解和特解
线性方程组的通解为什么等于特解加上零空间的向量,就可以解释了。因为零空间中的向量在线性变换中中只产生零向量,根据线性变换基本法:
来自零空间的 对线性变换没有贡献,带上它才能在“值域”不变的情况,让“定义域”完整。